科学技術館の火星探査ローバーの
エンジニアリングモデルについて
新しい宇宙機を開発するのに、地上実験や模擬実験(シミュレーションテスト)用のエンジニアリングモデルが製作されます。下記のリンク先に実際に火星を探査したローバの詳しい情報が掲載されていますが、科学技術館に展示のエンジニアリングモデルは外観的には似ていますが、裏面を見ると異なった構造であることがわかります。展示にはその解説がないため、「実物もこれと同じ機構」と誤解される懸念があるため、表1にその違いを紹介します。なお、このエンジニアリングモデルの試験目的は、筆者の機構からの想像でNASAに確認したものではありませんが、ローバの遠隔制御を中心とした制御システムの開発と考えられます。
表1 火星探査ローバとエンジニアリングモデルの比較
| 項目 | Sojourner (本物のローバ) | エンジニアリングモデル |
| タイヤ | アルミ合金 | ゴム (ただし、車輪ブラケットの下部とタイヤのリブが接触していることから、実験中は実際のローバと同じものを用い、展示用として模型用のゴムタイヤに付替えたとも考えられる) |
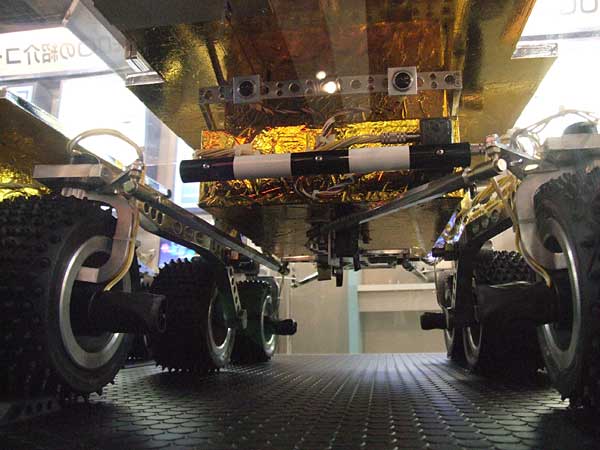
| 車輪の駆動 | 6輪を別々のモータで駆動 | 6輪のうち、前後の4輪を駆動。(上の写真から中央の車輪に電源線が接続されていず、モータがついていないことがわかる) |
| 操舵機構 | 前後の4つの車輪にそれぞれステアリング用のモータが取り付けられ、駆動。(直進方向とその場旋回の2位置で停止) | 本体下面のリンク機構で4つの車輪を同時に操舵。(上の写真でリンク機構の構造がわかる) |
| 懸架機構 | ロッカー・ボギー機構
(荒地の走行が可能) |
側面から見るとロッカー・ボギー機構であるが、前方のボギーの軸はボルトで固定されているのが写真からわかる。また、本機の操舵機構を正常に作動させるにはロッカー・ボギー機構が作動しないようにする必要がある。これより「ボギー軸が固定」(平坦な場所専用の走行系)という解釈が矛盾しない。 |
【リンク】